
کاوشگر «کنجکاوی» ناسا چگونه سیاره مریخ را شناسایی می کند؟
مریخ نورد «کنجکاوی» (Curiosity) ناسا چند سالیست که سطح سیاره سرخ را به دنبال نشانه های حیات در می نوردد، اما از سال گذشته رویکرد جدیدی را در پیش گرفته و با استقلال بیشتری کار ...
در دیجیاتو ثبتنام کنید
جهت بهرهمندی و دسترسی به امکانات ویژه و بخشهای مختلف در دیجیاتو عضو ویژه دیجیاتو شوید.
عضویت در دیجیاتوویدئوی مرتبط

مریخ نورد «کنجکاوی» (Curiosity) ناسا چند سالیست که سطح سیاره سرخ را به دنبال نشانه های حیات در می نوردد، اما از سال گذشته رویکرد جدیدی را در پیش گرفته و با استقلال بیشتری کار می کند تا انرژی و وقت کمتری را از دانشمندان آژانس فضایی به خود اختصاص دهد. این فرایند اکتشاف نسبتاً مستقل به کارکنان ناسا کمک می کند تا معضلات ارتباطی در فاصله بسیار طولانی تا مریخ را هم کمتر تجربه کنند.
ابزار AEGIS ناسا کاوشگر کنجکاوی را به دانشمندی مستقل تبدیل کرده است
زمینه ساز این قابلیت، نرم افزاری به نام «اکتشاف مستقل برای جمع آوری بیشتر علم» است که به اختصار AEGIS خوانده می شود. این نرم افزار به ربات ناسا اجازه می دهد تا طبق تصمیم خودش از ابزار ChemCam برای شناخت ترکیبات شیمیایی صخره ها، تابش لیزر روی آنها، و سپس مطالعه گازهای حاصل از این فرایند استفاده نماید. از زمان آغاز فعالیت این نرم افزار در ماه مه 2016 تا به امروز، کنجکاوی توانسته 52 مرتبه از آن در مکان های جدید بهره گیرد.
ترکیب مشاهدات تحت کنترل دانشمندان ناسا با فرایند خودکار فوق، میانگین تعداد تابش های لیزر مریخ نورد را از 256 پالس در هر روز، به 327 عدد رسانده است. هرچه تعداد تابش ها بیشتر شود، داده های بیشتری جمع آوری خواهد شد و در نتیجه ناسا درک بهتری از وضعیت کنونی مریخ و مهم تر از آن، وضعیت سابقش به دست خواهد آورد.
هر زمان که کاوشگر کنجکاوی به منطقه جدیدی از سیاره سرخ می رسد، حتی اگر چند متر با محل قبلی اش فاصله داشته باشد، نرم افزار AEGIS به صورت خودکار و با استفاده از دوربین های تعبیه شده روی ربات به اسکن محیط اطرافش می پردازد. پس از آن، بهترین بسترهای صخره ای برای مطالعه با ChemCam شناسایی و رتبه بندی می گردند. نهایتاً AEGIS اسلحه لیزری را آماده کرده و سنجش را آغاز می نماید. ناسا تابستان سال گذشته این فناوری را معرفی کرد و امروز در مقاله ای که در ژورنال «ساینس رباتیکس» منتشر شده، جزئیات آن را توضیح می دهد.
حال، زمانی که دانشمندان روی زمین به استراحت می پردازند، ربات کنجکاوی روی کره مریخ به انجام آزمایشات علمی مشغول است. این تکنولوژی بار سنگینی را از روی دوش آنها برداشته. لیزر تعبیه شده در ChemCam از زمانی که کنجکاوی در آگوست سال 2012 روی مریخ فرود آمد تا به امروز ، بیش از 440 هزار بار نزدیک به 1500 صخره مختلف را هدف قرار داده است. «ریموند فرانسیس» دانشمند ارشد ناسا با ارائه این آمار، اذعان داشت پیش از فعال شدن سامانه AEGIS تمامی اهداف لیزر باید به صورت دستی انتخاب می شدند.

فرایند انتخاب هدف از راه دور بسیار دشوار بود، زیرا دانشمندان باید با دستگاهی در فاصله حدود 240 میلیون کیلومتری ارتباط برقرار می کردند. گاهی اوقات ارسال یا دریافت هر سیگنال بین مرکز زمینی و کاوشگر مورد بحث به 20 دقیقه زمان نیاز داشت، ضمن اینکه چرخش مداوم زمین باعث می شد تا مریخ نورد در دید زمینیان قرار نداشته باشد.
سیستم AEGIS برای نخستین بار در کاوشگر «فرصت» ناسا به کار رفت
سیستم AEGIS روش کاملاً جدیدی را برای غلبه بر این مشکل پیش روی اخترشناسان قرار داد. این برنامه در ابتدا برای ربات «فرصت» (Opportunity) توسعه یافته و استفاده شده بود، اما دو سال قبل مراحل تغییر آن برای کنجکاوی آغاز شد. اواخر سال 2015، 21 هزار خط کُد برنامه AEGIS به حدود 4 میلیون کُد نرم افزار ناوبری کاوشگر کنجکاوی اضافه شد و نهایتاً پس از ماه ها تست و ارزیابی، بالاخره از ماه مه سال گذشته به حالت اجرایی درآمد.
اکنون زمانی که اپراتورهای مریخ نورد روی زمین برنامه پیمایش روز بعد آن را تنظیم می کنند، اهداف AEGIS را نیز تنظیم کرده و برایش می فرستند. AEGIS کارآیی بسیار خوبی در جابجایی روزانه دارد و ربات به واسطه آن می تواند محیط پیرامونش را مطالعه کرده و بهترین گزینه ها را برای عملیات شناسایی لیزری تعیین نماید. نهایتاً زمانی که دانشمندان روی زمین بیدار شوند، اطلاعات جدیدی را از کنجکاوی دریافت کرده و برنامه ریزی های بعدی را انجام می دهند.

فرانسیس در این رابطه می گوید:
بعد از هر بار پیمایش خودکار، زمان زیادی برای انجام آزمایشات علمی مورد نیاز است و معمولاً چندین ساعت تا غروب خورشید در مریخ باقی مانده، اما دانشمندان روی زمین هنوز اطلاعی در مورد مکان جدید کاوشگر ندارند و نمی توانند اهداف آزمایش را تعیین کنند. به همین دلیل، باید تصمیم گیری در مورد هدف روی مریخ انجام شود، و حال به این توانایی رسیده ایم تا از زمان باقی مانده به بهترین شکل ممکن استفاده کنیم.
قبل از به کار افتادن AEGIS دانشمندان گزینه های معدودی را برای افزایش بهره وری علمی در راهپیمایی های روزانه ربات در اختیار داشتند. مثلاً می توانستند کاوش علمی با ChemCam را صبح انجام دهند، اما با این کار باید ربات را در ساعات پایانی روز جابجا می کردند که به افزایش انرژی مصرفی برای گرم نگه داشتن تجهیزات و احتمال از کار افتادگی کاوشگر منجر می شد.
گزینه دیگر این بود که هدف گذاری لیزر را به صورت تصادفی انجام دهند. در این وضعیت، ربات به صورت بی هدف و بدون اطلاع از چشم انداز روبرو، لیزر را به زاویه خاصی می تاباند که فقط در حدود 24 درصد از موارد به صخره ای مناسب برخورد کرده و نتیجه مطلوب را حاصل می کرد.
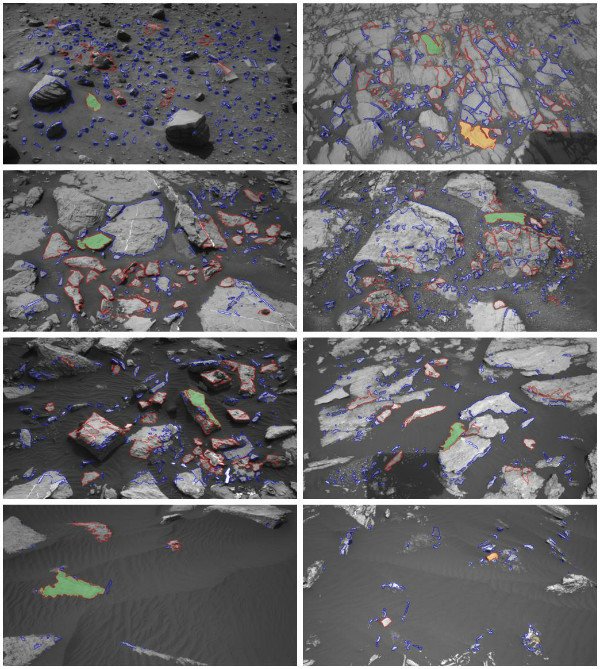
اکنون AEGIS ثابت کرده که در یافتن صخره های مناسب برای دانشمندان با دقت چشمگیر 93 درصد عمل می کند. این نرم افزار به گونه ای طراحی شده که دانشمندان می توانند پروفایل های هدف را برای آن تعریف کنند و سپس کنجکاوی به صورت مستقل و خودکار به دنبال صخره های مناسب در اطرافش بگردد، و ناشناخته های سیاره سرخ را آشکار سازد.
ناسا این فناوری خودکار را در پروژه MARS2020 توسعه می دهد
AEGIS این قابلیت را هم دارد که به اپراتورهای انسانی کمک کند تا ویژگی های جزئی و دقیق تری مانند رگه های خاص صخره ای را نیز شناسایی کنند، اما تا به امروز بیشتر در خدمت اکتشافات علمی کاوشگر قرار داشته است و در این راه به قدری مؤثر عمل کرده که می تواند مأموریت های بعدی این ربات و دیگر کاوشگرها را نیز تعیین کند. به گفته فرانسیس، AEGIS در ربات بعدی ناسا یعنی MARS2020 نیز پیاده سازی و به کار گرفته خواهد شد.
محقق ارشد این پروژه می گوید:
مأموریت 2020 یکی از پروژه های جاه طلبانه ناسا است که اهداف متعددی برایش تعریف شده و ربات باید فواصل بسیار طولانی تری را نسبت به کاوشگرهای قبلی بپیماید، ضمن اینکه نمونه های بیشتری را جمع آوری نماید. بنابراین انجام عملیات توسط خود ربات و عملکرد مستقل، یکی از نیازهای اساسی MARS2020 خواهد بود.

فرانسیس معتقد است AEGIS تازه شروع کار در زمینه خودکارسازی ربات ها برای انجام تحقیقات است. او می گوید در پروژه های دیگر به جز سیاره سرخ، مثلاً هنگام عبور نزدیک و شناسایی سیارک ها یا شهاب سنگ ها، ارزیابی زحل، بررسی آبفشان های سطح قمر انسلادوس یا دیگر موارد دورتر از مریخ، زمینیان اطلاعی از شرایط کاوشگر ندارند و به خاطر بُعد مسافت، کنترل لحظه ای روی وضعیت آن نخواهند داشت. بنابراین فضاپیما باید خودش بتواند واکنش مناسب را نشان دهد.
یکی از کاربردهای اصلی ربات های مستقل، شناسایی محیط های جهنمی مانند سیاره زهره است
این دانشمند ناسا اضافه کرد که AEGIS در محیط های به شدت مخرب مانند سطح سیاره زهره نیز بسیار سودمند خواهد بود. قوی ترین کاوشگرهای ساخت بشر که تا به امروز به سطح زهره رسیده اند، تنها چند دقیقه دوام آوردند و بنابراین فرصت چندانی برای کنترل ربات از زمین وجود ندارد. به همین دلیل، AEGIS می تواند سریعاً ربات را روی سطح سیاره نشانده، اطلاعات مورد نیاز را جمع آوری کرده و قبل از تخریب کامل کاوشگر، آن را از جهنم داغ آنجا نجات دهد یا حداقل اطلاعات را به زمین مخابره نماید.
گفتنیست با اینکه هدف نهایی ناسا اعزام فضاپیماهای کاملاً رباتیک به منظومه شمسی و فراتر از آن برای انجام تحقیقات علمی به صورت مستقل عنوان شده، اما AEGIS به این زودی ها نمی تواند جایگزین دانشمندان روی زمین شود و فعلاً در حد دستیاری نیمه خودکار باقی خواهد ماند. بنابراین در حال حاضر نقش سامانه هایی نظیر AEGIS استفاده از زمان های مفیدیست که پیش از این تلف می شد و روشی برای استفاده از آنها وجود نداشت.
دیدگاهها و نظرات خود را بنویسید
برای گفتگو با کاربران ثبت نام کنید یا وارد حساب کاربری خود شوید.







عملکرد و پیشترفشون بینظیره
منظومه شخصی؟